
§H昧¨∞ -ßYÆ…§‚∂’øÎ√—
≤’≠˚: ºB©˜æ± ¶øÆaºy §˝§H•∞
°@
´¸æ…±–±¬: øý©|ߪ
°@
¨„®s∞ æ˜:
¥∂πM™∫±±®Óæπ¶≥∑∆π´°B¡‰ΩL®Ï≤{§µ¨y¶Ê™∫ƒ≤±±¶°ø√πı°C¨∞§F®œ§H昧¨∞ •i•HßÛ•[§£®¸≠≠®Ó°A©Û¨O¶≥§Fƒ≤±±°B¡n±±µ•ßÞ≥N™∫•X≤{°A¶PÆ…æÞß@§Ë¶°§]≥Q§£¬_¶aßÔ®}°B¬≤§∆°C∞Ú©Û§W≠z≤z•—ß⁄≠ê{¨∞•H§‚∂’®”∂i¶ÊæÞß@∑|ßÛ®„§H© §∆§Œ•º®”© °C
°@
®œ•Œæπߘ:
ßYÆ…§‚∂’øÎ√—•≤≠n™∫≥]≥∆¶≥ƒ·ºv√Ë¿Y°A≠n¿HÆ…¶^∂«≥Ã∑s™∫ºvπ≥°A¶b•ª±M√D§§ß⁄≠ŒKinect¨∞æπߘ°A≤z•—¨OKinect∞£§FØý¥£®—ºvπ≥∏Í∞T•~°A¡Ÿ•i•H¥£®—≤`´◊∏Í∞T°AØýßÛ∑«ΩT¶aßP¬_•X§‚™∫¶Ï∏m°C
°@
°@
∫K≠n:
§£ªð∏g•—™Ω±µ∏Iƒ≤™∫§H昧¨∞ °C®œ•Œkinect¨∞√Ë¿Y°A߉®Ï§H≈È∞©¨[°A∞l¬Ð®‰§‚≥°´∫∂’°A¶A•Œlibsvm©M•˝´e´ÿ•þ¶n™∫º“´¨ß@§Ò∏˚°A¬ý¥´¶®¨€¿≥™∫´¸•O•Ê•—¿≥•Œµ{¶°∞ı¶Ê∞ ß@°C
°@
¬≤§∂:
°@°@øÎ√—§‚∂’ºvπ≥®√ªPπq∏£ßYÆ…§¨∞ ™∫¨„®s§w∏g¶≥§£§÷°C®‰§§±qºvπ≥øΪ{•X§‚°Bß‚§‚≥°ºvπ≥ªP≠I¥∫∞µ§¿¬˜°BƯ∞£§£•≤≠n™∫¬¯∞Tµ•°Aªð≠n§@≥s¶Í™∫ºvπ≥≥B≤zßÞ≥NπBß@°A©π©πØ”∂O≥\¶h∞ı¶ÊÆ…∂°°AπÔ©Û≥t´◊∏˚∫C™∫πq∏£°A≠nπÍ≤{ßYÆ…™∫§H昧¨∞ ∑|¶≥ßx√¯°C¶p¶Û¡Y¥ÓøΪ{§‚∂’©“ªð™∫Æ…∂°°AπÔ©ÛßYÆ…§‚∂’øÎ√—¨O´Ð≠´≠n™∫§@¿Ù°I
°@°@¶”XBOX360≥Ã∑s™∫πC¿∏æÞ±±æπ°GKinect°A∞£§FØý©Áƒ·±m¶‚ºvπ≥°A¡Ÿ®„¶≥Æ∑ƪ≤`´◊∏Í∞T•H§Œ±µ¶¨¡n≠µ™∫•\Øý°C±q≤`´◊∏Í∞T°A•H§Œ¨€¿≥™∫§H≈È∞©¨[∞ª¥˙•\Øý°A´KØý®œß⁄≠蟕h≥\¶h∂«≤Œ§‚∂’øÎ√—©“ªð≠n∞µ™∫®B∆J°B§ŒßÔµΩæÞß@™∫§Ë¶°°A®“¶p±q∞©¨[∞ª¥˙ß⁄≠ÃØýß÷≥t߉•X§‚≥°¶Ï∏m°A¶”§£•Œ≠≠©w§‚§@©w≠n¬\¶b√Ë¿Y•ø´e§Ë°F±q≤`´◊®”√—ßO§‚™∫ߌ™¨°A´ÐÆe©ˆ¥NØýƯ∞£≠I¥∫®√•B¥Ó§÷ªð≠nπL¬o™∫¬¯∞T°A±q¶”¥Ó§÷§FøÎ√—§‚∂’©“ªð≠n™·∂O™∫Æ…∂°°C
°@°@¶”¬«•—KinectØý∞˜Æ∑ƪ®√∞l¬Ð§H≈È∞©¨[°A≠n≥B≤z∞ ∫A™∫§‚∂’øÎ√—§SßÛ•[ª¥√Pºg∑N§F°C§]¶]¶πß⁄≠ÃøÔæЕHKinectß@¨∞¶π¶∏±M√D©“®œ•Œ™∫ºvπ≥±µ¶¨∏À∏m°Aπ¡∏’¶b¶π∞Ú¬¶§W°AµoÆi•X§Ë´K•B®≥≥t™∫ßYÆ…§‚∂’øÎ√—®t≤Œ°C
°@
¨yµ{πœ:
°@
¨yµ{πœª°©˙:
§@Øή”ª°°A¬^®˙®œ•Œ™Ã§‚≥°™∫ºvπ≥¨O®œ•Œ§@≠”≥ʧ@™∫ƒ·ºv昰A≈˝§‚¶Ï©Û√Ë¿Y™∫•ø´e§Ë°C¶”ƒ·ºv昱o®Ï™∫ºvπ≥§£∑|•u¶≥§‚°A¡Ÿ∑|•]ßt§H≈ȧJ√Ë™∫≥°§¿•H§Œ≠I¥∫°Aߌ¶®§@≠”æ„≈È°F¶π∫ÿ™¨™p§U™∫ºvπ≥°Aπq∏£¶]µL™k§¿øΕX§‚¶”≥y¶®ƒY≠´ª~Æt°C
<1>
≈™®˙Kinect©“©Áƒ·®Ï™∫ºvπ≥°A®√ßQ•ŒOpenNI®”¶s®˙¶πºvπ≥πœªP≤`´◊πœ°C
°@
<2>
NITE®„¶≥§¿™R§H≈È∞©¨[™∫•\Øý°A•u∂∑•˝∞µ•Xº–∑«§‚∂’(∞™¡|¬˘§‚)°A¥N•i•HßÏ•Xº∆≠”√ˆ∏`¬I™∫¨€√ˆ¶Ï∏m°C
<3>
¶”§‚∂’øÎ√—™∫≤ƒ§@®B°A∞£§F≠n≤M∞£ºvπ≥§§™∫≠I¥∫°A¡Ÿ≠nØý±N§‚≥°±q§H≈ȧ§§¿¬˜•X®”°A®√Ư∞£¬¯∞T°A≥ô·±o®Ï≥Êج™∫°®§‚°®°A¶]¶π§]Øý±o®ÏΩ¸π¯™∫∏Í∞T°A•—¶π´KØý±q§§§¿™R•Xß⁄≠铪ð≠n™∫ØSºx∏Í∞T°C§£©Ø™∫¨O¿Ùπ“•˙Ωu™∫≈Ч∆§]∑|æ…≠Pºvπ≥≈Ð∞ πL§j°A≥y¶®ª~ßP°A§@ØΙ∫≠I¥∫Ư∞£•—©Û•≤∂∑¿≥πÔ¶U∫ÿ≤{≥ı™¨™p°A≥o§£¨O≠”ª¥√P™∫∞ð√D°C¶˝¶b•ª±M√D§§°A•—Kinect™∫≤`´◊∏Í∞T•i•Hß÷≥t߉®Ï§H≈È°A§£π≥•H©π•uØý±qºvπ≥™∫¶‚±m∏Í∞T®”≥B≤z°A©“•H≠I¥∫™∫Ư∞£•i•H®≥≥tπF¶®°C¨GßQ•Œ§‚µ√√ˆ∏`¬I™∫≤`´◊¶Ï∏m°A•H¶π≤`´◊¨∞®Ãæ⁄°A®√≥]©wæA∑Ì™∫Ωd≥Ú°AπL¬o§£¶b≥oΩd≥Ú§∫™∫≠I¥∫§Œ™´≈È°C(®‰πL¬o§Ë™k¨∞±N¶bΩd≥Ú§∫™∫≥°§¿≥]¨∞1°A§œ§ß´h¨∞0°C)
°@
<4>
¡ˆµM±q≤ƒ§T®B∆J§§•i•HπL¬o±º§j≥°§¿™∫ºvπ≥°A¶˝≠Y¶≥®‰•L§£ªð≠n™∫¬¯¬I•B®‰≤`´◊∏®¶b≤ƒ§T®B∆J§§™∫Ωd≥Ú§∫°A´hµL™k•h∞£∏”¬¯¬I°A¨Gß⁄≠öA±qNITE©“≈™•X™∫§‚µ√√ˆ∏`¬IªP®B∆J§T©“±o™∫πœ∂i¶Ê§ÒπÔ°AΩTª{•X∏”∞œ∂Ù¨Oß_¨∞§‚≥°∞œ∂Ù°C
°@
<5>
¶π≥B≤z¨O±N§‚™∫≠´§þ¨∞≠ϬI∞µ•≠≤æ°A¶A•H§‚™∫ºe´◊§j§p¨∞∞Ú∑«°A±N®C±iπœ™∫§‚ºe¡Y©Ò¶Ð¨€¶P§j§p°A•HΩT´O§‚™∫ª∑™Ò§£ºv≈TßP¬_µ≤™G°A®√±N≠Ïπœ(§G∫˚)™∫x°ByÆyº–¬ý¥´¶®§@∫˚360´◊™∫∂Z¬˜º∆≠»°A®˙≥o®«∂Z¬˜™∫§Ë™k¨O•H≠´§þ¨∞§§§þ(•≠≤æ´·¨∞(0,0))°Aµe•X§@§Ù•≠Ωu≥qπL§§§þ°A•H¶π©π•™ß‰•X§‚≥°∞œ∂Ù¬˜§§§þ≥ê∑™∫∂Z¬˜°A¶A±N¶ππœ∞fÆ…ƒ¡±€¬ý§@´◊°C≠´Ω∆߉≥ê∑∂Z¬˜©M±€¬ý§@´◊™∫®B∆J°A™Ω®Ï¬ýßπ§@∞ÈßY•i±o®Ï§§§þ®Ï360§Ë¶Ï™∫≥ê∑¬I∂Z¬˜°C¶b360´◊®˙¬I§Ë™k§§°A¶U§‚∂’™∫ÆtßO¶b©ÛÆp™∫º∆∂q§Œ®‰§j§p°C
°@
<6>
≠∫•˝•˝±N®œ•Œ™Ã™∫§‚∂’ªPß⁄≠é“´ÿ¶n™∫∏ÍÆ∆Æw∂i¶Ê§‚∂’ßPßO°A¶π§ÒπÔ®œ•Œ®ÏSVM¨∞ßÞ≥N°A§¿™R®√ßP¬_∏”§‚∂’¨∞¶Û∫ÿ§‚∂’°C¶Ð©Û∞ ∫A§‚∂’´h¨OßQ•Œ•ÿ´e™∫§‚µ√¶Ï∏mªP´e§@±iπœ™∫§‚µ√¶Ï∏mÆyº–¨€¥Ó°A®√ßP¬_®‰≤æ∞ §Ë¶V°C
µ≤™Gπœ:
<®B∆J 1~4>
<®B∆J 5>
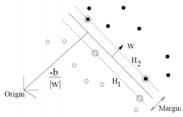
¬≤§∂SVM(Support Vector Machines):
Support Vector Machines(SVM)¨O§@∫ÿ§¿類∫t∫‚™k°A•— Vapnikµ•Æ⁄æ⁄≤Œ≠pæ«≤þ理論¥£•X™∫§@∫ÿ∑s™∫æ˜æπæ«≤þ§Ë™k°C•ª±M√D§ßSVM±ƒ™L¥º§Ø±–±¬™∫libsvm°C
SVM ¶b∏—®M§pºÀ•ª°B´DΩu© §Œ∞™∫˚º“¶°識ßO∞ð√D§§™Ì≤{•X≥\¶hØS¶≥™∫¿u∂’°C§w∏g¿≥•Œ©Û§‚ºg≈È識ßO°B§T∫˚•ÿº–識ßO°B§H¡y識ßO°B§Â•ªπœπ≥§¿類µ•πͪ⁄∞ð√D§§°A© Øý¿u©Û§w¶≥™∫æ«≤þ§Ë™k°A™Ì≤{•X良¶n™∫æ«≤þØý力°C±q¶≥≠≠∞V練ºÀ•ª±o®Ï™∫®Mµ¶≥W´hπÔøW立™∫¥˙∏’∂∞§¥Øý∞˜±o®Ï∏˚§p™∫ª~Æt°C
¬≤≥Ê來說°ASVM∑Q≠n∏—®M•H§U™∫∞ð√D:߉•X§@≠”∂W•≠≠±(hyperplane)°A®œ§ß±N兩≠”不¶P™∫∂∞¶X§¿∂}°C¨∞什ªÚ®œ•Œ∂W•≠≠±≥o≠”¶Wµ¸°A¶]¨∞πͪ⁄∏Í料•iØý¨Oƒð©Û∞™∫˚度™∫∏Í料°A¶”∂W•≠≠±∑N´¸¶b∞™∫˚§§™∫•≠≠±°C
•H§G∫˚™∫例§l來說°A¶p§Uπœ°Aß⁄≠Ãß∆±ÊØý߉•X§@±¯ΩuØý∞˜±N∂¬¬I©M•’¬I§¿∂}°A¶”•Bß⁄≠áŸß∆±Ê≥o±¯Ωu∂Z離≥o兩≠”∂∞¶X™∫√‰¨…(margin)∂V§j∂V¶n°A≥oºÀß⁄≠ç~Øý∞˜´Ð©˙ΩT™∫§¿øÎ≥o≠”¬I¨Oƒð©Û®∫≠”∂∞¶X°Aß_´h¶b≠p∫‚§WÆe易¶]∫Î度™∫∞ð√D¶”≤£•Õª~Æt°C
°@
§‚∂’øÎ√—≤vªPµ≤™G:
ß⁄≠ñN¡ø∏—±o®ÏøÎ√—≤v™∫§Ë™k°A≠∫•˝¶bKinect´e§Ò•XØS©w§‚∂’°A•—¨yµ{πœ™∫®B∆JπB∫‚•X360´◊™∫∂Z¬˜º∆≠»°A•H¶πº∆≠»´ÿ•þ∏ÍÆ∆Æw°A¶A•—SVMß@¶®model°A±N¥˙∏ͪPmodel§ÒπÔ°A¬«•HßP¬_¨∞¶Û∫ÿ§‚∂’°C
•H§U™∫§‚∂’¨∞1®Ï5°A•H150±iπœ∞µ§¿™R∑Ìmodel°A¶A±N≥o150±iπœ∞µøÎ√—°A≥o150±i§¿ßO¨O3§H®C∫ÿ§‚∂’¶U10±i°C¨∞®D§Ë´K∆[πÓ§w§‚πœ®”ße≤{°Aµ≤™G¶p§U:
°@
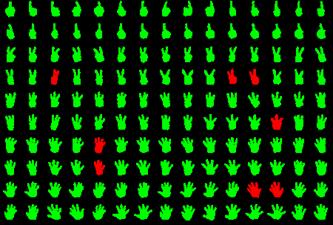
(πœ§§∫Ò¶‚¨∞øÎ√—¶®•\°A¨ı¶‚¨∞øÎ√—ø˘ª~)
øÎ√—≤v¨∞94.667%(142/150)
•—§W≠z§Ë¶°•i•H™Ï®B§¿™R•XøÎ√—≤v°A¶˝¨O∂i§@®BøÎ√—≤v§¿™R•≤∂∑±NºÀ•ª∏Úmodel§¿∂}°A©“•Hß⁄≠Œ•Ê§e≈Á√“(Cross-validation)°A∞µ™k¨O±N∏Í料©Ó¶® n≤’¨€¶P§j§p™∫∏Í料°A®Ãß«øÔ®˙§@≤’∞µ¨∞¥˙∏’•Œ°A≥—§U®‰•L≤’™∫∏Í料´h•Œ來∞µ∞V練°C±N¶PºÀ™∫150±iπœ∞µ•Ê§e≈Á√“°AøÎ√—≤v¨∞93.333%°C (µ˘:ª~ßP™∫≠϶]•iØýªP§‚´¸∂°∂Z©M§‚µ√©∑Ωu¶≥√ˆ)
¨€√ˆ¿≥•Œ:
¬«•—øÎ√—•X®”™∫§‚∂’ß⁄≠Õi•H±N®‰¿≥•Œ¶b≥\¶h≥°§¿§W°A®“¶p:ß⁄≠Õi•Hµ≤¶X∞ ∫AªP¿R∫A§‚∂’®”∞µßκv§˘™∫≥¯ßi°BBBS™∫¬sƒ˝°B≠µº÷§Œºv§˘™∫±±®Óµ•µ•°C
•H§U¨∞ßκv§˘º∑©Ò®t≤Œ§ß§∂≤–:
°@
§H昧¨∞ -ßκv§˘ºΩ©Ò®t≤Œ
°@
°@
≤’≠˚: ºB©˜æ± ¶øÆaºy §˝§H•∞ ≠Jµ˙Æm ßı©…¿R ∂¿µÆ∏µ
°@
´¸æ…±–±¬: øý©|ߪ
°@
∑ß©¿
¶b≤{¶b¨ÏßÞµoπF™∫™¿∑|§§°A∂V®”∂V¶h¶—Æv®œ•Œßκv§˘®”§WΩ“°A¶˝¨O¶b§¡¥´ßκv§˘™∫Æ…≠‘©π©π≥£•≤∂∑´ð¶bπq∏£Æ«√‰°A¶”≥oºÀ™∫§Ë¶°°A§j§j™∫ºW•[§FªP≈•≤≥≠ç¨∞ ™∫§£§Ë´K°C¶”¶≥Æ…≠‘•≤∂∑µeΩuß@∞O∏π™∫¶a§Ë°A§]•≤∂∑´ð¶bπq∏£Æ«°A¶]¶π∑Q≥]≠p•X§@ÆMØý∞˜≈˝®œ•Œ™Ã∫…±°≤æ∞ ™∫ßκv§˘ºΩ≥¯®t≤Œ°C
ßQ•Œ∑L≥n∑s±¿•X™∫Kinect®”∑Ìß@ƒ·ºv√Ë¿Y°AµM´·®œ•Œ™Ã•i•H¶b√Ë¿Y©“§ŒΩd≥Ú§∫≤æ∞ °A•i•H®œ•Œ∞ ß@®”æÞ±±™∫•\Øý•]ßtºΩ©Òßκv§˘°B∑∆π´™∫•™•k¡‰°B¶^®Ï≠∫≠∂µ•µ••\Øý°C≥q±`®œ•Œ™∫¶a¬I•i•H¨O∑|ƒ≥∆U°B±–´«°B©Œ®‰•L∏˚©˙´G™∫¶a¬I°C≥oÆMßκv§˘ºΩ≥¯®t≤Œ°A•i•Hµπ¶—Æv°B∫t¡ø™Ãµ•µ•®œ•Œ°A¡|§Zªð≠n•Œ®Ïßκv§˘™∫≥ı¶X≥£•i•H®œ•Œ°C
•\Øý
Step1:©w¶Ï
πÔµ€kinect∞µ•Xº–∑«§‚∂’°A´ð®‰≈™®˙√ˆ∏`¬I™∫¨€√ˆ¶Ï∏m°C

°@
°@
°@
°@
°@
°@
°@
Step2:®œ•Œ¿R∫A§‚∂’•\Øý
•˛ø√πı:±N•k§‚¶V´e°A•k§‚πÔµ€√Ë¿Y§Ò•X§‚∂’4ßY•iß𶮕˛ø√πı™∫•\Øý°C
¶^≠∫≠∂:±N•k§‚¶V´e°A•k§‚πÔµ€√Ë¿Y§Ò•X§‚∂’2ßY•iß𶮶^≠∫≠∂™∫•\Øý°C
∑∆π´¥Âº–: ±N•k§‚¶V´e°A•k§‚πÔµ€√Ë¿Y§Ò•X§‚∂’1ßY•ißπ¶®∑∆π´¥Âº–•\Øý(ßYπpÆgµß™∫•\Øý)§ß∂}±“§Œ√ˆ≥¨°C
∑∆π´•\Øý≥]©w(¬I¿ª•™¡‰§@¶∏)©Œ(•™¡‰´ˆ§U/ºu∞_): ±N•k§‚¶V´e°A•k§‚πÔµ€√Ë¿Y§Ò•X§‚∂’5ßY•i§¡¥´∑∆π´•\Øý°Cπw≥]¨∞∑∆π´¬I¿ª•™¡‰§@¶∏°A≠Yªð®œ•Œµeµß(´ˆ§U©Ï¶≤´·¶Aºu∞_)¥N∂∑§¡¥´∑∆π´•\Øý°C
°@
(µ˘: ¿R∫A§‚∂’§ßßP¬_¨∞®œ•Œ§W≠z§‚∂’øÎ√—™∫§Ë™k°C)
(µ˘: πpÆgµß§ß≠Ï≤zΩ–∞—æ\°®§H昧¨∞ -§H§‚πpÆgµß°®™∫≥°§¿°C)
°@

°@
°@
°@
°@
°@
Step3:®œ•Œ∞ ∫A§‚∂’•\Øý
®œ•Œ§Ë™k:±N•™§‚∞™¡|¶Ð¿Y°A•k§‚πÔµ€√Ë¿Y©π§W≤æ∞ ©Œ©π§U≤æ∞ °A¶b¶πßκv§˘º∑©Ò®t≤Œ§§ßY¨∞§W§@≠∂ªP§U§@≠∂§ß•\Øý°C
Step4:∑∆π´¥Âº–°B•™•k¡‰§ß•\Øý
¥Âº–: •H•k§‚´¸®Ï´Ãπı™∫¶Ï∏mß@¨∞∑∆π´¬I°C
•™•k¡‰: •™§‚©π•™•≠¡|™Ì•Ð•™¡‰°A§œ§ß°A©π•k•≠¡|™Ì•Ð•k¡‰°C
![]()
∂}µo§u®„ªPßÞ≥N:
ƒ·ºvæπߘ°G Kinect
∂}µo¿Ùπ“°G Microsoft Visual Studio 2008
OpenCV2.0
OpenNI 1.1.0.41
PrimeSense - NITE 1.3.1.5
∞—¶“∏ÍÆ∆Æw
libSVM http://www.csie.ntu.edu.tw/~cjlin/libsvm/index.html