智慧型影像監測系統之物體追蹤
902519 曾惠淇
Advisor : 賴尚宏 教授
一、研究目的
這個計畫主要目的是應用在監視系統上,建立出一個安全性的監視系統,能夠追蹤所有在鏡頭裡移動的物體的軌跡,能夠進一步作一些判斷來發現可能正有犯罪意圖的人,或是作一些分析以獲得其他所需的資訊。
二、研究問題簡介
一般監視系統拍攝影片時,攝影機是靜止沒有運動的,且背景相對於攝影機也沒有整體的位移產生(靜止背景),如此得到一段連續影像。如何在這一連串的影像序列中,建立背景影像並偵測出移動的物體,然後將移動的物體個別分離出來並且追蹤它們,這便是我們的問題所在。
三、研究方法及步驟
我們系統設計的基礎假設有兩個:
1. 背景相對於攝影機是固定不動的,最多只能容忍輕微的晃動。
2. 影片裡任一畫素中,背景出現的時間,需要比任何單一前景還多。
(因為我們統計是以最常出現的顏色群,當作我們的背景圖素代表,所以若前景出現超出背景,偵測結果將會錯誤。)
我們系統需要影片來回播放三次來完成移動物體偵測與分割。第一次播放,主要是在分析背景,利用交叉的統計長條圖來找出每個圖素在R、G、B、normalized R、normalized G五個色頻中的代表分佈間距;接著利用第一次分析的結果,進行第二次播放的動作,分別將五色頻中,座落在鎖定的背景分佈間距裡的點統計起來,利用所有收集到的背景點,來統計建立五個高斯分佈曲線來代表每一個圖性,並另取每一個曲線的mean值來當作背景代表色;第三次播放,則是實際做移動物體偵測分離。
以下是這個流程的flow chart:
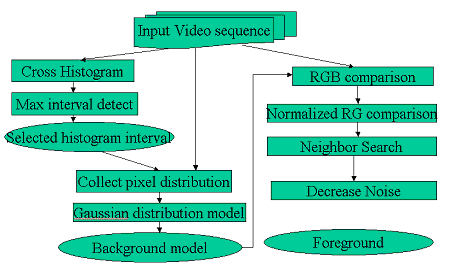
我們將問題分成幾個要解決的步驟:
1. 背景分析
2. 背景統計
3. 前景偵測
4. 陰影及光影變化的消除
5. 克服整體輕微搖動及背景小範圍常規運動
6. 加速系統運算效能
7. 利用Component Labeling來找出Connected Components(框出移動中物體)
8. 追蹤moving objects的track
1. 背景分析
我們將影片分成背景和有運動的前景。
已知假設影片中裡的任一畫素中,背景出現的時間需要比任何單一前景還多,於是我們便可以統計出最常出現的顏色群來當作背景圖素代表。
考慮到可行性和速度的問題,不可能每個pixel都作處理,所以我們需要作quantize和長條圖(histogram)統計,求出背景中每個pixel在五個色頻中分佈的主區間,五色頻分別為紅、藍、綠(由影片中直接取得)、正規後的紅、正規後的藍(分別用紅藍原色除以三色頻的總合)。
在實作上,我們假設五個色頻之間的關係是獨立,即其分佈機率可由五個分佈曲線求出再相乘得到。在統計時,我們將五色頻獨立分開做,在採計資料時, quantize將值域等分16部份來當作我們每個bin的橫跨區間(例如R分佈在0-255之間,所以每個bin表示16個色值)。在這邊,我們利用一個交叉的長條圖來做統計,因例如我們取0~15為一個bin、16~31為下一個,若我們的背景資料分佈於14~19,不論我們取哪一個bin當做有興趣的間距,都會造成捨棄上的誤差,造成統計出來的mean值偏離,而variance也被低估,所以,也就是我們在上述的兩個bin中,插入一個bin負責統計8~23的分佈,理論上,如剛所述主要分佈於14~19的背景,會讓8~23的bin大於0~15和16~31兩個,我們就能避免掉因為quantize所產生的邊緣問題。
在影片跑過一次後,我們分別針對每個pixel的每個色頻,在31個interval(16個正常間距、15個跨組間距)所統計到的個數,鎖定一個最多份佈的區間,當作我們背景分佈的鎖定區域,也就是假設所有這個區間以外的顏色分佈,為其他雜亂前景。
2. 背景統計
有了背景中每個pixel在五個色頻中分佈的主區間後,就可以進行統計工作,產生高斯分佈,建構背景分佈模型。當我們在做實際上移動物體偵測的時候,就可以有個參考的機率分佈,判斷為前景還是背景。
取每個點統計出的mean值為代表色,我們即可得到一個不含前景的背景圖像。而取得的高斯分布可幫助我們依每個pixel在不同色頻上的變異量訂出前景的threshold。
實作上,我們可以分別累加輸入值和其平方,並紀錄已經納入多少個點,只要保留這些資訊,而不用真的將每個值的分佈先暫存下來,我們就可以用此三值求得mean、variance。
3. 前景偵測
我們假設五色頻的分佈都是各自獨立的,即機率分佈各自沒有相對關係, 於是將一張影像中的每一個像素跟都背景像素的五色頻相比,若落於背景分佈的容忍範圍內,就將之歸為背景,反之為前景。即若輸入的色彩資訊,對比於其同一位置的背景模型,若距mean值左右在標準差的某個倍率內,則判定其為背景,反之為前景。
為了速度與準確率的考量,我們先只考量RGB三個色頻,在沒有大規模光影變化或是攝影機雜訊的情況下,我們就能得到不錯的結果,而且也在這一部份,把大部份背景點給刪除。
4. 陰影及光影變化的消除
由於陰影及光影變化主要都是亮度變化,並不會影響組成色的比例,因為我們可以將所以判定為前景的點,再用normalized R和normalized G這兩色頻去檢驗,若發現和背景組成比例類似的,就改判為背景。normalized R和normalized G這兩色頻所代表的資訊是R和G在RGB中的組成比例。
5. 克服整體輕微搖動及背景小範圍常規運動
影片中難免會有攝影機的小晃動,或背景中有一些物體如樹會來回作常規的小幅度擺動,這可能會影響邊界會有一些錯位產生雜點。我們可以到輸入的前景點對應到的背景點附近,找一個最相似的背景點分佈,若這個點的高斯分佈能容忍這個前景,即改判為背景,或取前景點附近跟背景點最相似的點,改判斷這個點和背景分佈的差異,若能找到一點在容忍範圍內,則改判為背景。
6. 加速系統運算效能
統計背景模型時,不需要每一張影像、圖素都做,只要間隔取一定張數,就可以很容易的取得有代表性的背景分佈。由一個像素代替附近小local window也能使速度加快許多。
7. 利用Component Labeling來找出Connected Components(框出移動中物體)
前面5個步驟做完後,就能找出所有被判定為前景的部分了,但此時所得到的前景結果,除了移動的物體外,仍然有許多小雜點的雜訊干擾。為了能偵測出移動的物體,然後將移動的物體個別用框框分離出來並且追蹤它們,此時需用Component Labeling來找出有大面積的Connected Components(相對於小雜點)。
Component Labeling 簡略的Algorithm如下:
| Recursive Connected Components Algorithm 1. Scan the image to find an unlabeled 1 pixel and assign it a new label L. 2. Recursively assign a label L to all its 1 neighbors. 3. Stop if there are no more unlabeled 1 pixels. 4. Go to step 1. |
實作上,因受限於影片的解析度的關係,被判定為前景的pixel常斷斷續續,無法完美的形成一個Connected Component,或是有兩個Connected Components重疊而成了一個,使之中會有空隙,因此在assign its neighbors(Step 2)時,有可能遇到已經給其他label了的一小塊component的情形,此時為了增快效率,於是將pixel個數少的那一component的label,全部重新assign成另一個個數比較多的label,使其成一個Connected Component。
8. 追蹤moving objects的track
經由前面7個步驟所判斷出來的前景,還是可能包括不是moving objects前景的光影變化,於是我判斷為moving objects前景的條件是:
1. object的size要有一定程度大小
2. 並且在前一個frame的同位置附近必須也有前景,或是由影片的邊緣進入(表第一次進入,前一個frame同位置附近沒有前景)
將判斷為moving objects前景的中點連續標在影片上,即為其moving tracks。當此moving object離開畫面後(即前一個frame有前景,但現在這一個frame同位置附近沒有前景了),我便將畫面上所有屬於這個離開的object的track消去。
此步驟在實作上的困難為,由於每個frame中同個moving object被標的label很可能不一樣,所以必須不停的update frame中track,將此moving object所對應到的track(目前是對應到上一個frame的label) update成對應到現在這個frame的object label,如此一來整條track才會屬於同一個moving object,最後要消去track時才能正確消去。
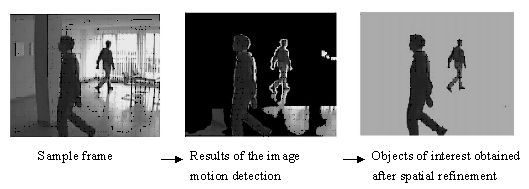
四、實作結果
l 影片一:只有一個moving object的情況。
輸入影片: 輸出影片:
l 影片二:剛好object1離開畫面的同時,object2從同地進入畫面,於是整條track判斷為
同一moving object的track。(把object1和object2當成同一物體,在邊緣迴轉)
輸入影片: 輸出影片:
五、專題製作心得
這次的專題是我第一次接觸到這類型的程式—寫一個智慧型影像監測系統,這是之前在修過的課堂上,寫過的homework、project中,都不曾接觸過的程式類型。學長推薦我可以選擇使用BCB或是VC來當tool,由於要結合學長之前的程式,所以我採用VC。
剛開始接觸到一個全新型態的程式,我花了許多時間在學習、看懂這些新的東西,又由於我的專題只有我一個人一組,所以更需要花加倍的時間來做準備。雖然老師和學長都提供了許多paper可以作為參考,但由於這也是我第一次看paper,很多都是有看沒有懂,於是經歷了一段完全不知道應該如何著手的過渡時期,光是想要把從影片中抓到的frame轉成圖片,寫這種小功能我就寫了3.4天,完全不知道該怎麼寫。
感謝後來學長的指導,再加上我不斷的try& error,終於讓我稍微摸熟了這新的程式,並且開始著手寫我的專題程式,並且得以順利達到我專題的目標。
這次專題我學到許多,因為這次的專題,讓我第一次有讀paper的機會,雖然經常還是有看沒有懂,但至少我跨出了第一步,相信以後讀paper的機會會越來越多,我也能慢慢的駕輕就熟。此外,雖然這次是自己一個人一組,無法體驗到與同伴分工合作一起完成一件project的感覺,但是也讓我學會了如何自己慢慢去看懂前人寫好的code,學會如何de這類程式的bug,學會如何從一個不算小的程式中著手去撰寫、發展自己想要的功能。有些寫了很久的東西,後來寫好以後才發現,其實都是一些很簡單的觀念,只是因為當時不得其門而入,所以才會覺得很困難,但現在經過這次專題之後,我對於tracking of video object motion有了一定程度的了解了,也越來越有興趣了,相信這對於我以後的發展會非常有幫助!