ObstacleDetection Using Stereo Matching
一、摘要
Stereo Matching 是利用左右兩台攝影機模擬雙眼,由左右兩張影像的disparity來算出物體深度。關於這次專題的內容,主要是希望提高計算 disparity 的速度, 參考了幾篇 paper 的方法,試著將它們結合。
算disparity可以視為解Markov Random Field的問題,專題中是用Belief Propergation(BP)來估計disparity。在 ”Implementation of BP for Early Vision” [1] 中提供了一個降低 BP 複雜度 的演算法,在 “Bilayer Stereo Matching”[2] 中則是運用了 bitwise 的概念,把 label 換成二進位,一個一個 bit 算,同時為了提高準確度,提出了 bilayer 的方式,把 label 值 分為前景和背景兩個範圍,分別對全圖的每個點算出最適合的值,再算出各個點是前景還是背景。這次就是結合這兩個方法。
二、方法概述
1. Belief Propagation
計算 disparity field 可以視為找出 Markov random field (MRF) model 裡最適合的 label 值使得 energy function 為最小。

上面為 energy function的式子,N是所有把相鄰兩點連接起來的 edge, P 是圖上的所有點, f 是 label 值 fp 和 fq 分別為 p, q 兩個 node (這裡代表兩個 相鄰的點) 的 label 值, Dp(fp)為點 p 的 label 值為 fp 的 cost, ) , V(fp, fq) 則是相鄰的兩點 p, q 的 label 值為 fp, fq 時的 cost。
這邊我們是用 belief propagation 來解 MRF model,BP 的式子主要如下:
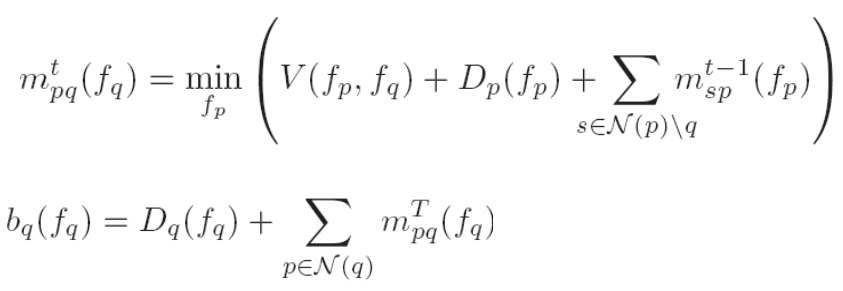
mtpq 為點 p 傳給點 q 的 message,前一次的結果都會影響下一次的結果,是遞迴的計算,經過T次後,每一點都會決定一 p f 使得 p b 的值收斂為一最小值, 這樣的方式在有 n 點,k 個可能的 label 值時,所需的時間為O(nk2T)
2.Efficient Belief Propagation
這是[1]中提出的方法,這裡我稱之為 Hierachical BP,主要有下列幾點改進:
(a)computing message
原來的BP每一次都要花O(k2)才能決定一mpq,由於V(fp, fq)是建立在fp, f
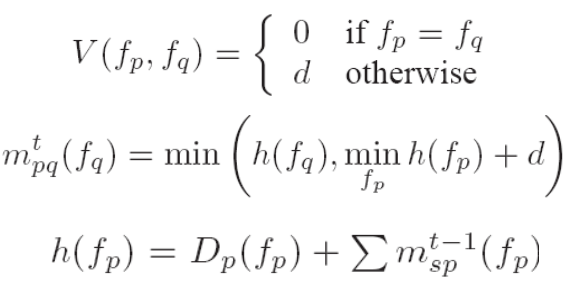
再加入truncated linear model:
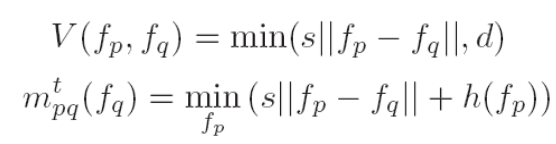
依照以上的式子,使用下列演算法:
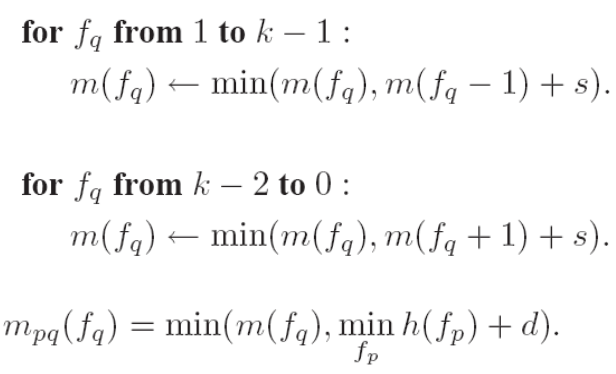
Time Complexity 變為O(k)
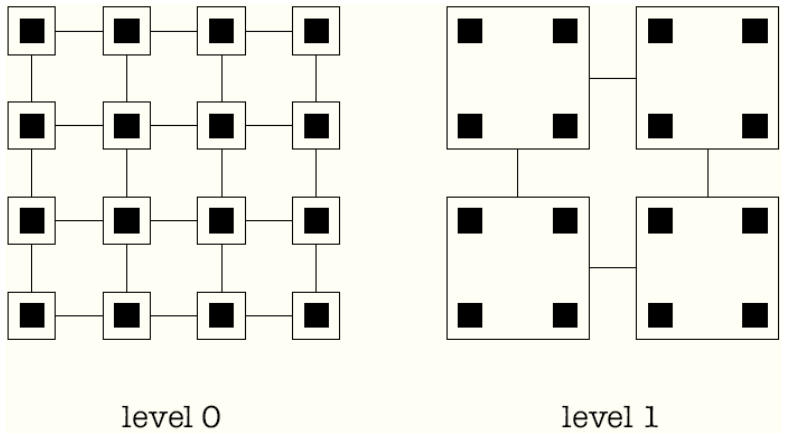
(b)multiscale BP
miltiscale 方法是把原來的圖分層很多層,上層的一個node代表著下層的許多node,計算結果從粗略到精準,方法如下圖 level 1 的一個 node 代表了 level 0 的四個 node。上層計算的初始值就是下層收歛的結果 ,這樣的方式可以加快原本 BP 傳遞 message 所需的收斂時間,也就是降低 T。
3. Bitwise Algorithm
這方法是[2]裡面提出的,一次決定 label 的一個 bit,若label有k個可能的值,原本要 O(k),現在就只要 O(logk),以下是[2]中的演算法,我把裡面graph cut的方法改成用 HBP:

4. Bilayer Stereo Matching
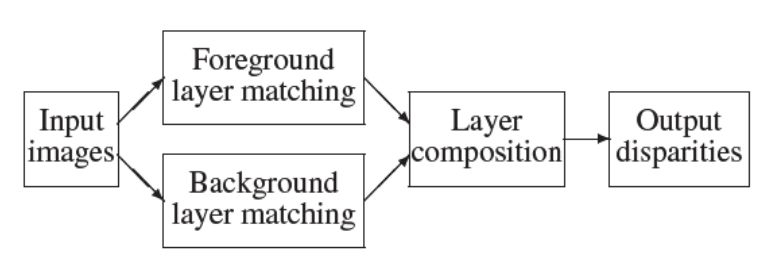
最後我們再利用 bilayer 方式,改善得到的結果,主要的方式是把 disparity 分成前景和背景的範圍,分別找出在每點機率最大的值,再用前背景得出的值決定每一點是前景還是 背景記錄在 intermediate layer 的 label 當中,在專題的作法中,每次都是用 BP 去決定 label 值,所以總共是做了三次的 BP ,而整個流程如下:
而能改善的原因,主要是因為當沒有分前背景時,傳遞 message 時,在物體邊界的部分(前背景的交界)屬於背景範圍的 disparity 值,會影響到前景的部份,反之亦然,把前背 景分開處理後,問題就減少了。另外,在我們做障礙物偵測時,我們正好可利用 intermediate layer 的資訊,把前景的部分視為障礙物。
三、結果比較
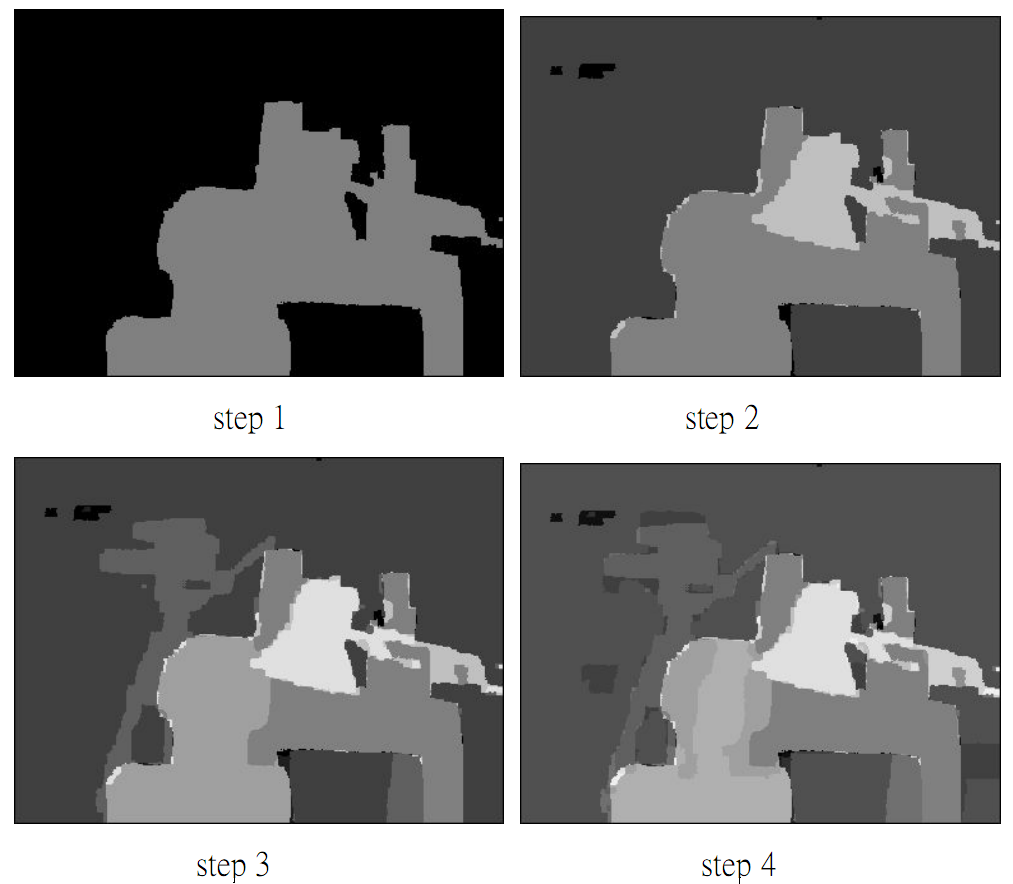
1. bitwise
以下是 bitwise 的結果
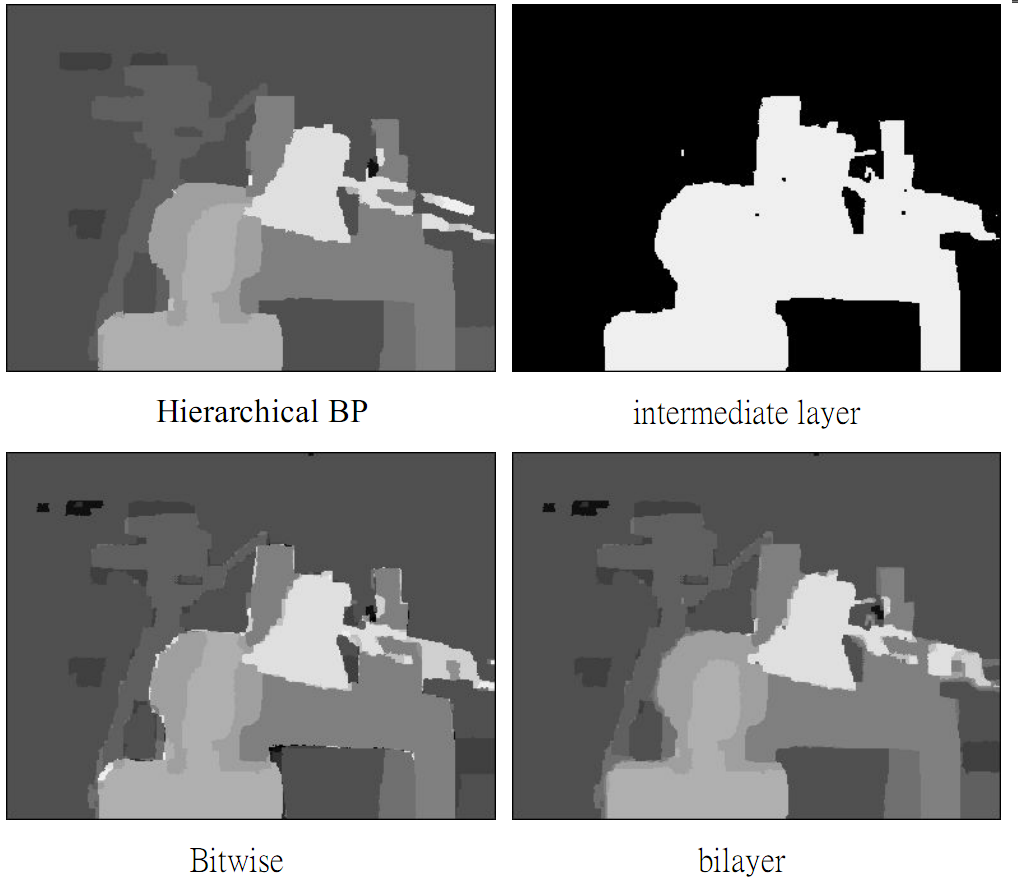
2. 結果比較
以下是 HBP,bilayer,單純Bitwise HBP,還有intermediate layer 的結果
3. 時間比較
下表為三種方法的所花時間(s)

可以發現當 label 數越大時, bitwise 加速的效果就越明顯,加了 bilayer 後,Teddy 和 Cones 的時間還是比沒用 bitwise 來的短。
4. 結果評測
下表是在 middlebury 網站[3]上所做的評測
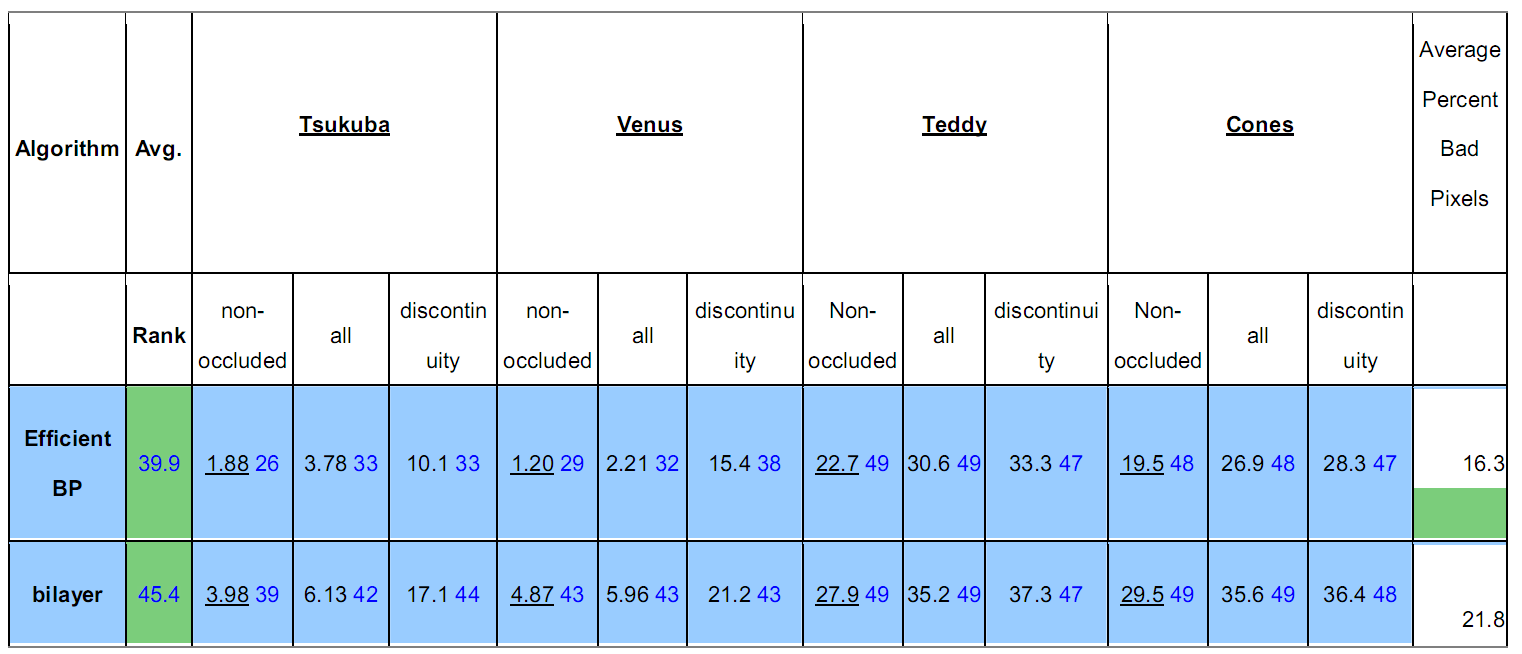
可以發現,加了 bilayer 後,的確改善了 bitwise 的結果,但還是比 Hierarchical BP 差了一點。
四、結論
利用 BP 來解 MRF model 所需的時間受到 label 數和 node 數( 圖片大小 ) 的影響最大,而在 label 數的部份,使用 bitwise 的方法,降低了 complexity,圖片大小方面,則是利用 multiscale 使得所須計算 的次數減少,根據實驗結果可以發現,當圖片越大,label 範圍越廣時,我們結合了兩個演算法,確實加速了不少。而另一方面,利用 bilayer 的技巧,不僅可以提高我們結果的準確度,同時前背景的分離,正好可以 作為障礙物偵測的一個依據。
五、參考資料
[1] Pedro F. Felzenszwalb and Daniel P. Huttenlocher. Efficient Belief Propagation for Early Vision. 2004
[2] Dengfeng Chai and Qunsheng Peng. Bilayer Stereo Matching. 2007
[3] http://vision.middlebury.edu/stereo/