Silhouette-Based Camera Calibration from Sparse Views under Circular Motion
| Po-Hao Huang | Shang-Hong Lai |
| even@cs.nthu.edu.tw | lai@cs.nthu.edu.tw |
| National Tsing Hua University | National Tsing Hua University |
Abstract
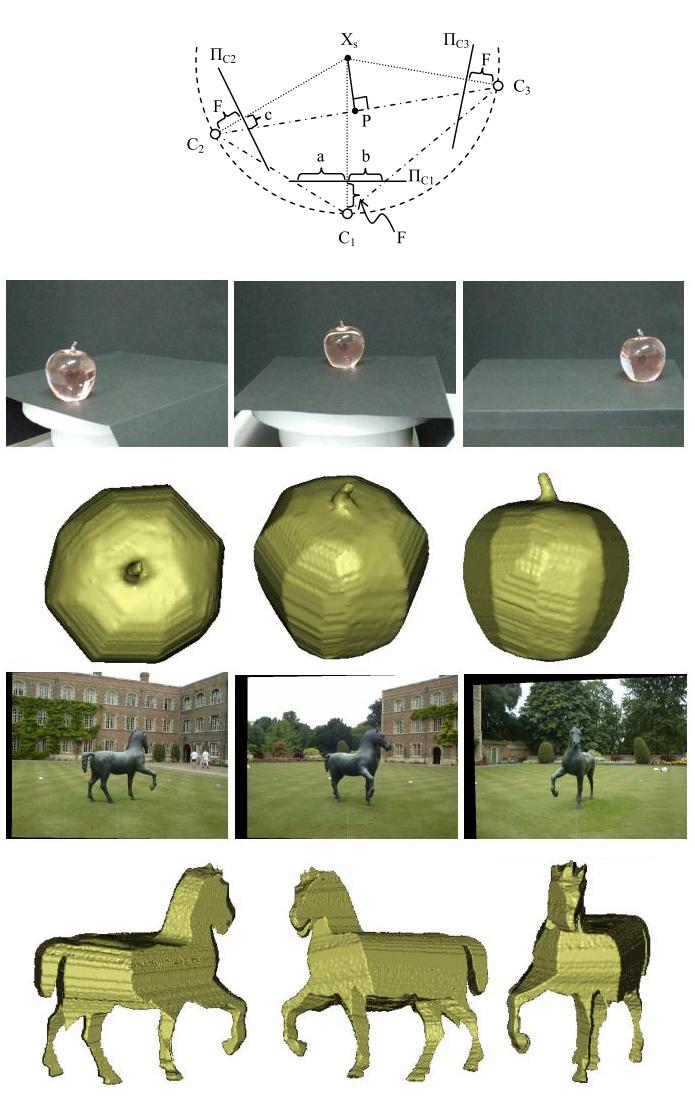
In this paper, we propose a new approach to camera calibration from silhouettes under circular motion with minimal data. We exploit the mirror symmetry property and derive a common homography that relates silhouettes with epipoles under circular motion. With the epipoles determined, the homography can be computed from the frontier points induced by epipolar tangencies. On the other hand, given the homography, the epipoles can be located directly from the bi-tangent lines of silhouettes. With the homography recovered, the image invariants under circular motion and camera parameters can be determined. If the epipoles are not available, camera parameters can be determined by a low-dimensional search of the optimal homography in a bounded region. In the degenerate case, when the camera optical axes intersect at one point, we derive a closed-form solution for the focal length to solve the problem. By using the proposed algorithm, we can achieve camera calibration simply from silhouettes of three images captured under circular motion. Experimental results on synthetic and real images are presented to show its performance.
Related publications
-
Silhouette-Based Camera Calibration from Sparse Views under Circular Motion
P.-H. Huang, and S.-H. Lai
IEEE Conf. on Computer Vision & Pattern Recognition, Alaska, USA, Jun. 24-26, 2008.(pdf)
Last updated on November 25, 2010.