<ABSTRACT> <INTRODUCTION> <ALGORITHM> <IMPLEMENTATION> <CONCLUSION> <REFERENCE>
IMPLEMENTATION The
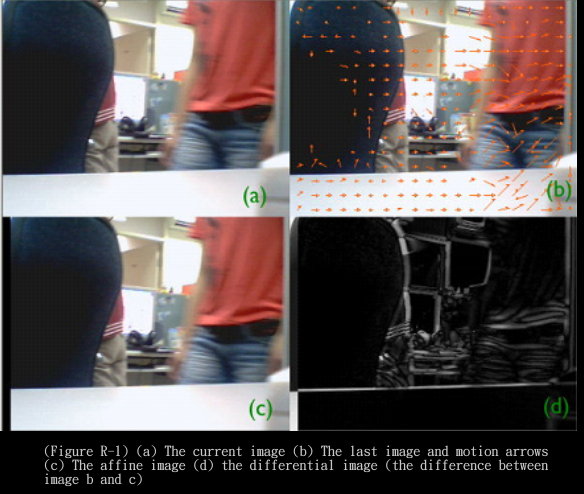
output images are as Fig R-1 . Image (a) is the current frame . Image
(b) is the last frame combined with the motion arrows . Image (c) is
the affine image . Using the affine parameters and the current frame
to rebuild an affine image . Image (d) is the differential image which
shows the difference between last image and affine image .
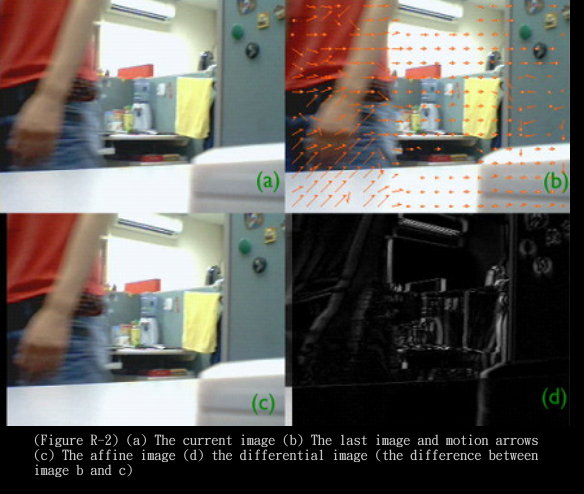
Figure
R-2 shows a more obvious difference between the motions of foreground
and background objects . If there’s no movement from previous frame
to the current frame , it’s output will be like Figure R-3 .
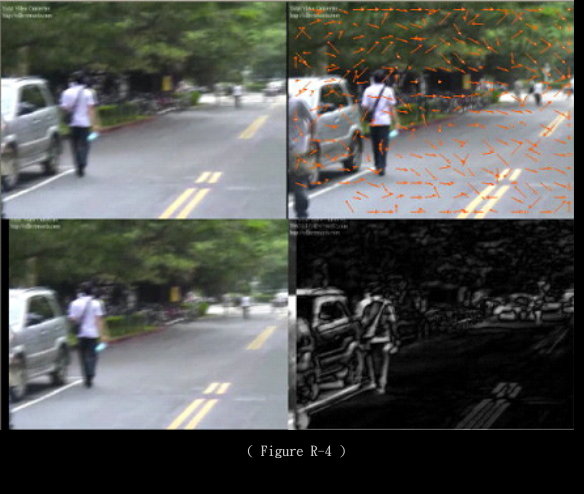
This system is restricted to take a stable video as input . If the shaking of the whole video is strong , the DS algorithm can’t tell the difference from foreground and background by their own motion . See the example of an unstable video as Fig R- 4 , the arrows indicating the motions of blocks are in disorder . We can’t even tell the difference between the motion of foreground and background by observing these arrows .
|