Implementation Plan
Utilize
and Collect our own data
- Using Kinect
- v2 Space translation
Optimization
- Adding temporal data
- Other adaptation measures
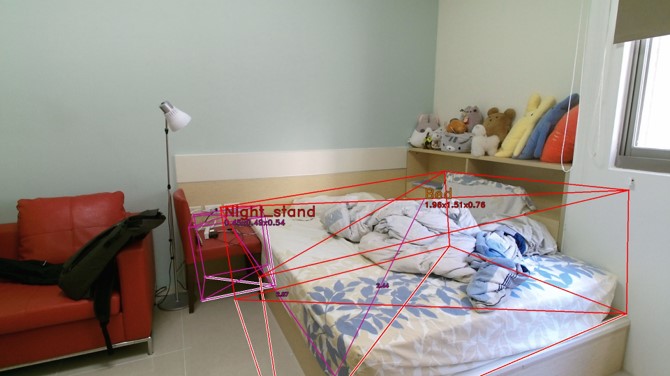
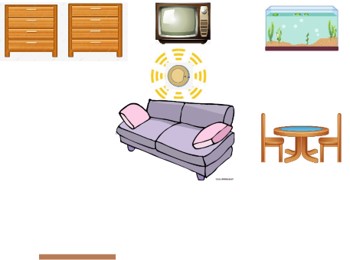
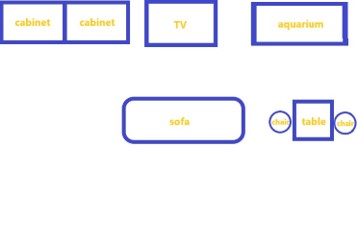
Visualization
and Presentation
-
In
2D/ 3D
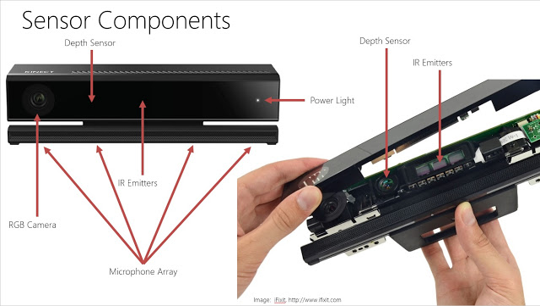
Experiment - Kinect V2
Original
for XBOX
- More affordable compared to LiDAR
- Computer
vision development communities (C++, C#)
Structure
- RGB camera
- Depth camera
-
Infrared
camera



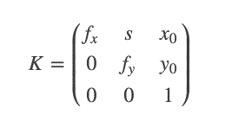
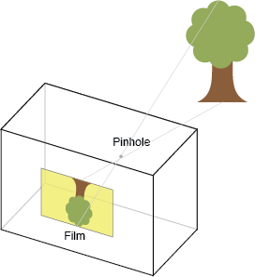
Experiment - Camera Calibration
Intrinsic
matrix
- From photo coordinate to camera coordinate
- Differ slightly with different Devise
Extrinsic
matrix
- From camera coordinate to world coordinate
- Define world coordinates
- Neglect shift
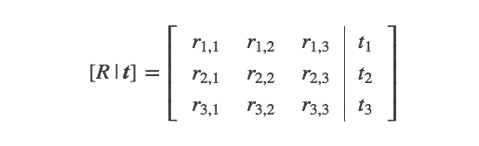
Mapping
the relation with rotation
- Rightward +x, Forward +y, Upward +z
- Roll(x)/Pitch(y)/Yaw(z)
- Differ with rotation angle

Experiment - optimization
Temporal
data
- Time relationships between frames
- Duplicate output / Wrong classification/ Falsely detected
(1) Non-maximum
Suppression
- Using Integration over Union(IoU) as threshold
- Eliminate same class duplication
- Correct different class misclassification
(2) Timeout measures
- Assure existence
- Delete false misunderstood ones


Experiment - Other adaptations
Desk/Table
merging
- High similarity
- Differ with furniture style Model misconstrue
Toilet/Bathtub
deletion
- Not used in presentation scenes