Detection Model
PointNet
- Directly working on point cloud
PointNet++
- Enhance on Further Point Sampling/ Ball query
- Better
local feature extraction / density adaptation
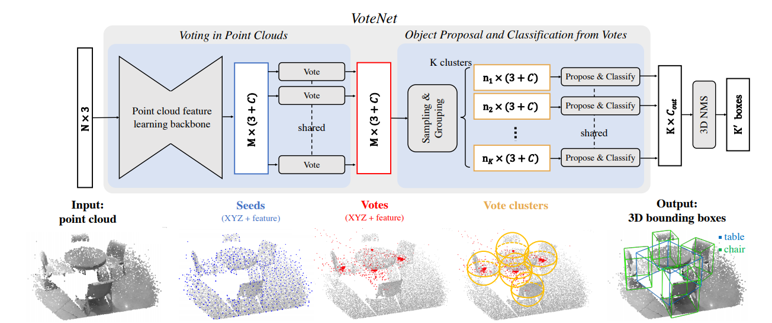
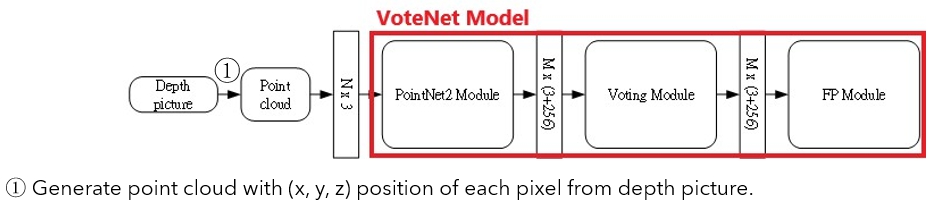
VoteNet (Our backbone model)
-
PointNet++ as backbone
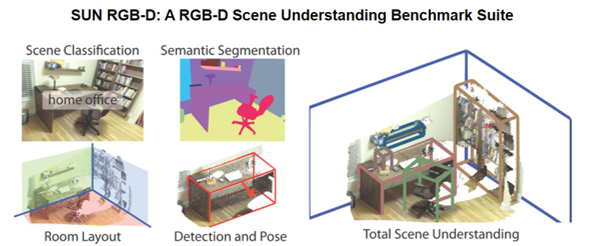
Dataset - SUN RGB-D
Indoor
dataset
Total
19 categories
- Focusing on 10 of them
- Bed/table/sofa/chair/toilet/desk/dresser/night stand/book/bathhub

Measure
Performance
-
mAP: average precision with 3D IoU
threshold 0.25
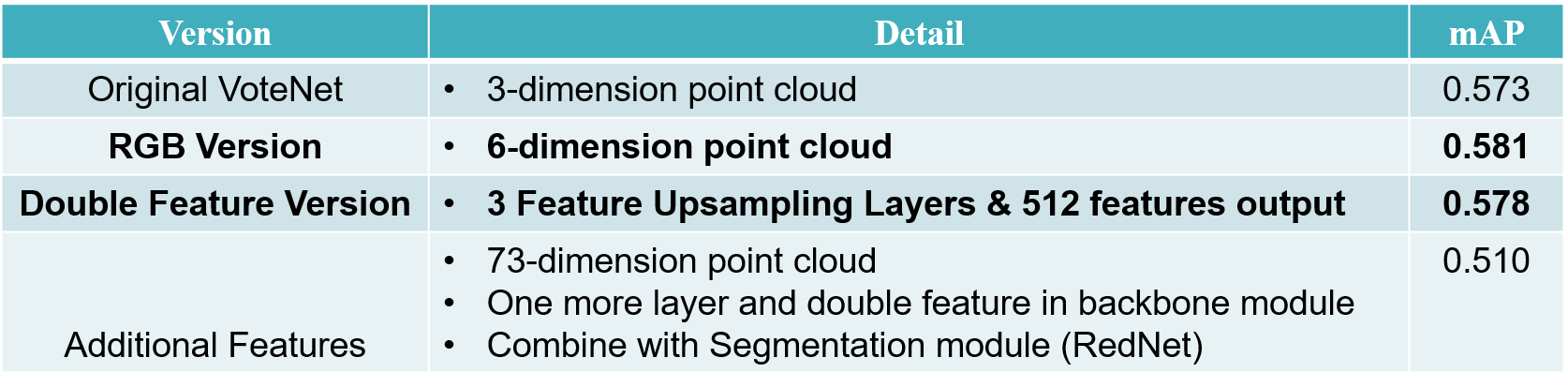
Official VoteNet
Performance:
- mAP: 0.573
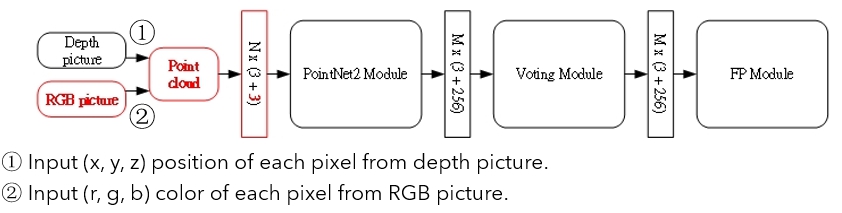
VoteNet with RGB
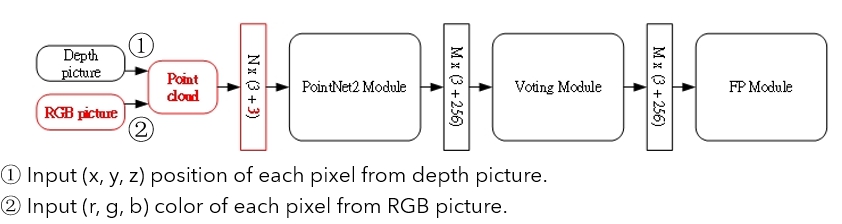
Change
the input information from point cloud
- Original: 3-dimension (x, y, z) of each pixel
- Modified: 6-dimension (x, y, z, r, g, b) of each pixel
The
improvement of performance is not obvious
- mAP: 0.586
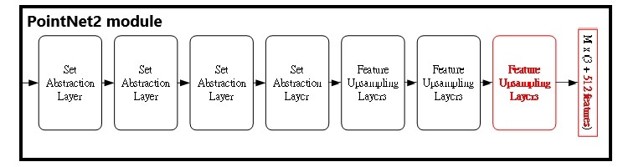
Double Feature Version
Modified backbone module
- 4 Set Abstraction Layers
- 3 Feature Upsampling Layers
- Output 512 features
The
improvement of performance is not obvious
- mAP: 0.578
Additional Feature Version
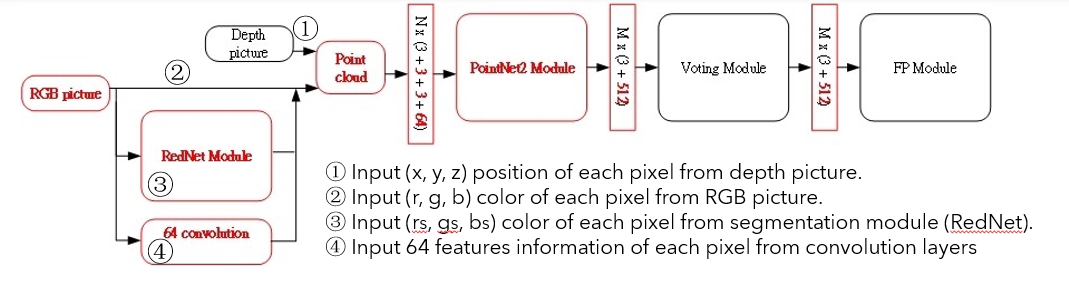
Change the input information from
point cloud
- RGB version: 6-dimension (x, y, z, r, g, b) of each pixel
- Modified: 73-dimension (x, y, z, r, g, b, rs, gs, bs, 64 convolution features) of each pixel
The
improvement of performance is still not efficient
- mAP: 0.510
Comparisons of the attempts