SensatUrban: 3D semantic segmentation challenge with limited resources
Motivation
As the students of computer science, we have interest in computer vision which is a highly practical field. After studying various papers in the field of computer vision, we found that there is no model that can reach 8-90% mioU(Mean Intersection over Union) in 3D semantic segmentation with in large dataset. Generally, a model which can reach 5-60% mioU is considered SOTA model(state-of-the-art), which means the most prominent model in specific research tasks or benchmark datasets. Even these SOTA models only have 1-20% mioU in some classes that are too small, and the average performance of 5-60% is still quietly different from the correct rate that people pursue. Compared with practical CV application, such as facial recognition system or anomaly detection, 3D semantic segmentation still cannot perform efficiently and effectively in practice.
When we search papers about computer vision, we saw a challenge and workshop in 3D semantic segmentation -- Urban 3D Challenge.
About Urban 3D Challenge
Urban 3D Challenge built by European Conference on Computer Vision (ECCV) aims to establish a new urban-scale point cloud segmentation benchmark. This challenge is held for the second year. There are two competitions: 3D semantic segementation and 3D instance segmentation.

SensatUrban Dataset
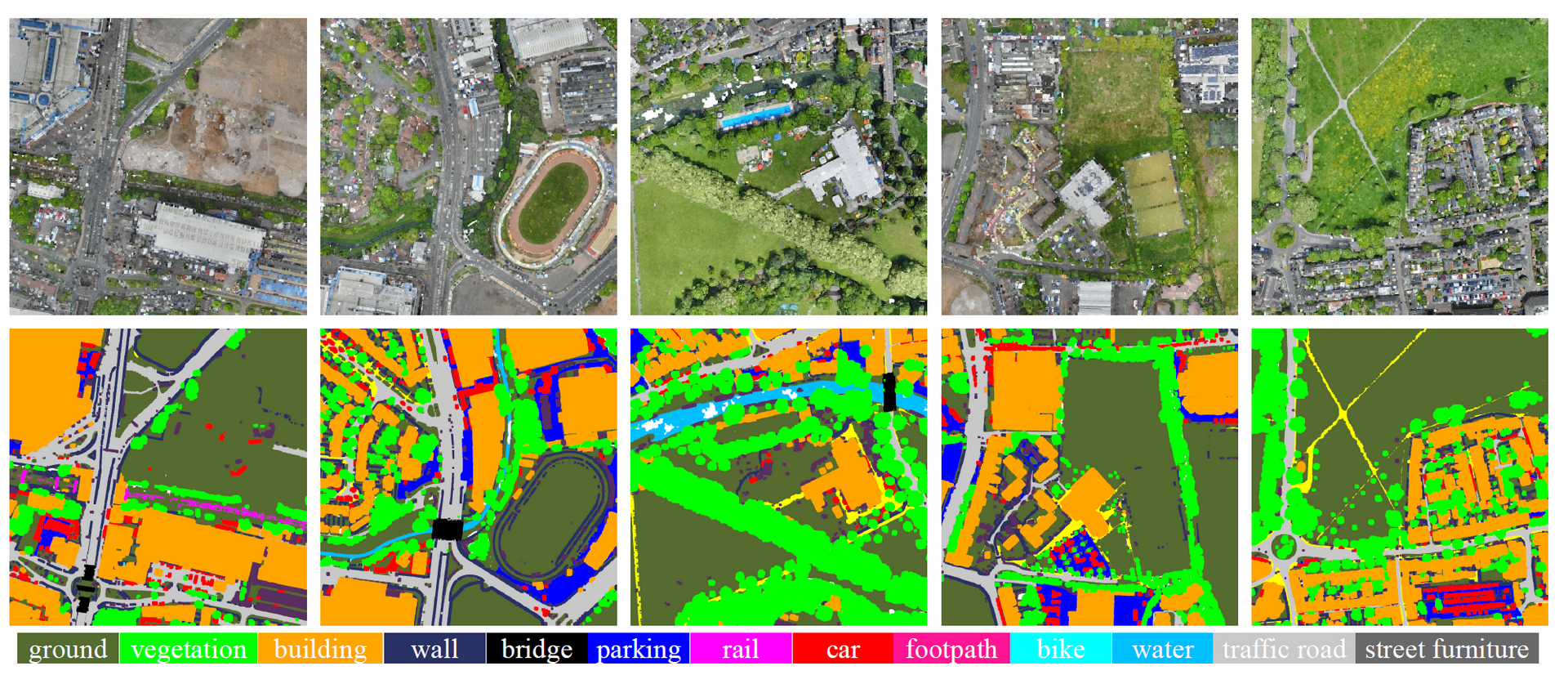
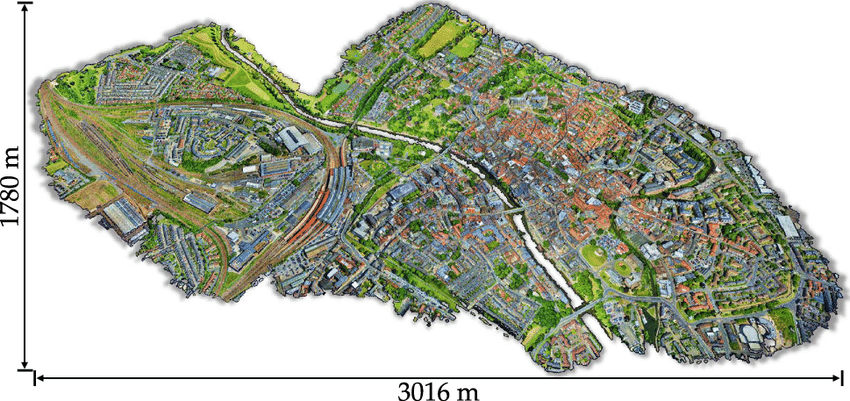
In 3D semantic segmentation, the dataset used for this challenge is SensatUrban. This dataset is currently the largest point cloud dataset in the world, containing nearly 3 billion points with detailed classification and labeling in 7.6 square kilometers, each point is marked as one of 13 semantic categories. The largest categories such as ground, buildings, and vegetation account for more than 50% of the entire point cloud, while catogories such as bicycles and rails only account for 0.025%. This imbalance also shows the uneven distribution of different semantic categories in real scenes.
So we decided to take the 3D semantic segmentation research in the Urban 3D Challenge as our topic, and tried to achieve the best performance as possiblee under the relatively limited environment.